

서 론
재실자 위치 추적 방법
재실자 위치 인식 기술
삼변측량
BLE beacon을 활용한 재실자 위치 인식 시스템
재실자 호흡역 중심 공기질 제어의 효과
챔버 실험 개요
챔버 기밀성능평가
Case 설정
결과 및 토의
인체 호흡역 중심 공기질 제어의 미세먼지 농도 저감 효과
결 론
서 론
최근 미세먼지가 심각한 사회문제로 대두되면서 실내공기질에 대한 사회적 인식 또한 높아지고 있는 추세이다. 실제로 미세먼지는 일반 먼지와 다르게 입경의 크기가 매우 작아 코나 구강, 기관지에서 걸러지지 않고 체내에 흡수될 가능성이 높다(Tzivian, 2011). 이에 따라 미세먼지의 농도가 높은 환경에 장기적으로 노출될 경우, 호흡기계 질환뿐만 아니라 폐암 혹은 만성 폐쇄성과 같은 폐 질환을 유발될 가능성이 높아진다(Shin, 2007). 또한 초미세먼지는 혈액을 순환하며 심혈관계 질환의 위험성을 높이며 이를 제거하기 위한 면역세포의 작용으로 염증을 일으킨다. 이와 같이 면역력이 급격하게 저하될 경우 다양한 호흡기 질환과 함께 부작용이 발생할 가능성이 높다(Ristovski et al., 2012). 만약 미세먼지가 인체에 미치는 악영향과 실내공기질의 관심 증가로 실내에서 공기청정기의 활용도가 높아지고 있는 상황이다.
그러나 기존 공기청정기의 운용 방식의 경우 고정된 위치에 설치되어 사용되고, 국부 공간에 한해서 효과를 발휘한다는 단점이 있어 공기청정 효율성 측면에서 개선의 여지가 필요한 상황이다. Park et al. (2020)는 실내 미세먼지 농도를 저감하기 위하여 반자율형 공기청정 시스템을 개발하고 그 성능에 대하여 분석했다. 특히 반자율형 공기청정기를 활용하여 재실자의 호흡역을 중심으로 미세먼지의 농도를 제어하였다. 그 결과 일반적인 실내공간에서 발생할 수 있는 미세먼지의 오염 농도에서는 재실자의 호흡역 중심으로 공기질을 제어할 경우 충분한 효과가 있음을 입증하였다. 그러나 공기청정기가 직접 이동하는 방식의 경우 실내오염원의 발생 위치를 실시간으로 특정 지을 수 있어야하며 위치를 추적하기 위한 센 서가 다량으로 필요하다. 또한 실내의 재실 인원과 평면에 따라 공기청정기의 이동에 제한이 발생한다. 이에 따라 본 연구에서는 이러한 단점을 보완하는 재실자 호흡역 중심 공기질 제어 시스템 개발을 위한 프로토타입 도출을 목적으로 수행되었다.
호흡역이란 재실하는 인원의 입 또는 코에서 0.3 m 이내로 정의할 수 있다(Ojima, 2012). 또한 오염원으로부터 인체가 근접한 위치에 있을 경우 입자상 물질의 농도가 하체 부분에 해당하는 높이보다 상체 부분에 해당하는 높이에서 더 높은 경향이 있는 것으로 보고되었다(Bull et al., 1987). 이에 따라 호흡하는 영역과 같이 국부적인 영역에서의 미세먼지 농도를 저감시켜 실내공기질을 제어할 수 있다. 또한 외기가 오염되어 있는 경우 공기청정기를 활용하여 실내의 미세먼지 농도를 저감시킬 수 있으며 공간의 용적대비 적절한 청정화능력을 가진 공기청정기를 활용할 경우 환기를 통한 실내공기질 전략보다 미세먼지 농도 저감에 효과적이며 비용 측면에서도 경제적일 수 있다(Noh and Yook, 2016).
이에 따라 본 연구에서는 Bluetooth low energy (BLE) Beacon을 활용하여 재실자의 위치를 기반으로 국부적인 영역에서의 공기 정화 기능을 수행할 수 있는 스마트 공기청정 시스템을 개발하고자 하였다. 본 시스템은 실내오염원의 위치와 관계없이 재실자의 호흡역에 오염물질 농도를 제어하는 방식으로 공기청정기의 효율성과 실내공기질을 개선하고자 한다. BLE beacon을 활용한 재실자 호흡역 중심 공기질 제어 시스템은 현대인이 가장 보편적으로 사용하는 스마트폰을 태그로 활용하여 재실자의 위치를 인식하고자 하였다. 또한 알고리즘에 따른 동작을 통하여 재실자의 호흡하는 영역으로 공기청정기의 정화된 공기를 보내주는 것을 목표로 한다.
재실자 위치 추적 방법
재실자 위치 인식 기술
스마트폰 사용의 증가 및 네비게이션의 활용도가 증가함에 따라, 실외 측위의 실용화와 더불어 실내 측위(Indoor Positioning)에 관한 연구 개발이 활발하게 진행되고 있다. GPS는 실외에서 서비스가 가능하나 실내 공간에서는 다양한 실내환경변수에 따라 신호 수신이 불안정하여 정확한 위치 추정이 어렵다(Kim et al., 2013). 그러나 실내공간에서도 사용자를 식별하기 위한 사용자 위치 기반 서비스(Location based service, LBS)에 대한 수요가 급증함에 따라 실내 공간을 위한 위치 기반 서비스 연구 개발이 증가하고 있다. 실내 환경에 적합한 LBS를 제공하기 위해 RFID (Radio frequency identification), WLAN (Wireless local area network), UWB (Ultra wide band), BLE (Bluetooth low energy) 등 무선통신 기술을 이용한 위치 추적이 필수적으로 동반되고 있다.
이 중에서도 UWB는 초 광대역 및 고 투과성으로 가장 높은 측위 정밀도를 가지지만 TDoA (Time difference of arrival) 방식의 특성상 시간 동기화 기기의 배포 문제와 간섭 민감도가 높은 편이다(Lim et al., 2021a). RFID는 상대적으로 높은 측위 정밀도와 낮은 거리 오차를 제공하지만, 측위를 위해 사용되는 인프라의 구축비용이 높다는 단점이 있다(Son et al., 2013). WLAN은 네크워크 기반의 기술로, 여러 장치에 적용할 수 있다는 장점이 있으나, 통신 시 송수신 되어지는 모든 장치가 네트워크에 연결되어 있어야 하며, 해킹의 위험이 있다는 단점이 있다. 이에 반해 BLE 기술의 경우에는 1 m 이하의 측위 정밀도 구현에 어려움이 존재하지만 저전력으로 다양한 장애물 조건 하에 장시간 유지되며, 경제적 효용성을 가지는 실내 공간에 가장 적합한 무선기술로 평가되고 있다. 이에 따라 최근 시판되는 대부분의 스마트기기는 BLE를 지원하고 있어 실제 상용화에서도 가장 적합한 기술이라 평가되고 있다. BLE 기반 실내 측위 기법 중 하나인 AOA (Angle of arrival) 기법은 신호가 들어오는 각도을 이용하여 거리를 측정하게 되며 이 거리를 이용하여 위치를 계산하는 방식 중 대표적인 위치계산법으로 삼변측량(Trilateration)이 있다(Kim et al., 2011). 따라서 본 연구에서는 BLE beacon을 활용하여 재실자 위치를 인식하고 삼변측량법으로 그 위치를 계산하여 재실자 중심 호흡역 공기질 제어 시스템에 활용하고자 하였다.
삼변측량
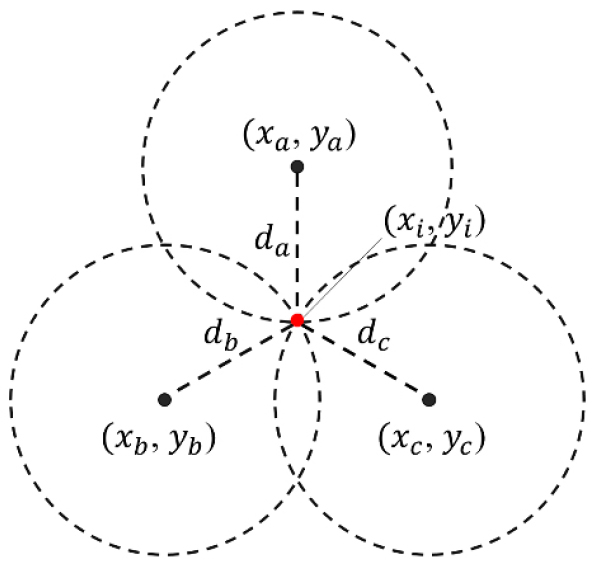
삼변측량은 사용자의 위치를 추정하기 위해 3개 이상의 기준점과 그 거리정보를 사용한다. Figure 1과 이 최소 3개의 비콘과 임의의 위치에 있는 1개의 태그를 중심으로 3개의 원을 형성한다. 여기서 원의 반지름 는 기준점 좌표를 알고 있는 각 비콘(a, b, c)으로부터 태그에 의해 수신되는 RSSI (Received signal strength indicator)값을 거리 변환 함수에 의해 변환된 거리 정보를 지칭한다. 3개의 원이 겹치는 좌표(x, y)는 이 RSSI 정보를 연립방정식인 식 (1)에 대입하여 계산할 수 있다(Lim et al., 2021b). 삼변측량을 통한 위치 추정에 있어서는 태그에 대한 각 BLE beacon의 거리변환 함수 값은 일정 영역 이내에 존재해야 한다. 최종 측위에는 주변 환경요소에 의한 거리 오차의 유발 요소가 존재한다
BLE beacon을 활용한 재실자 위치 인식 시스템
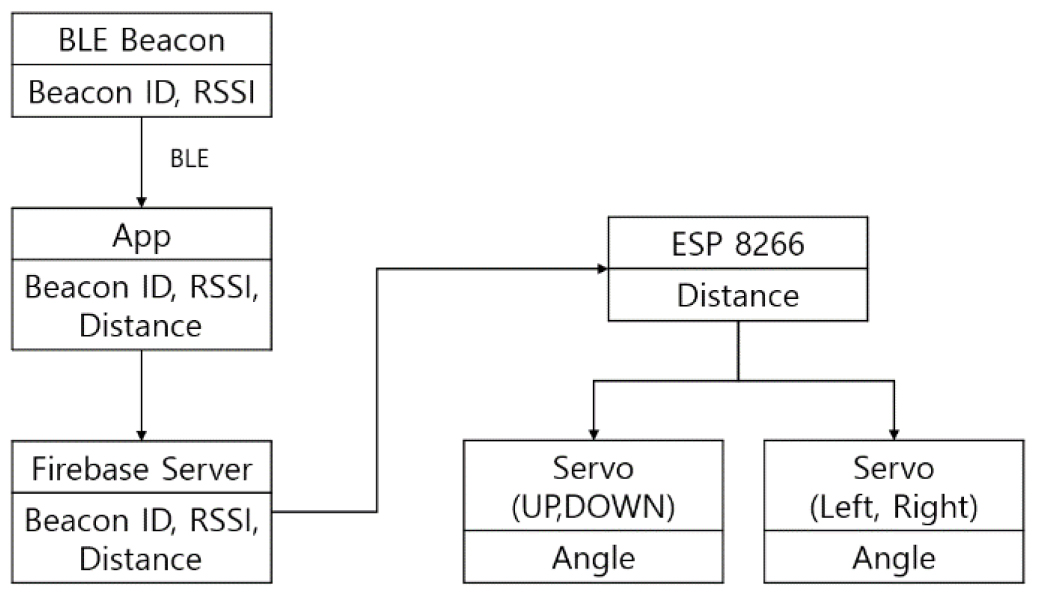
BLE beacon을 활용한 재실자 위치 인식 방법은 실내 환경에서 태그를 소지한 재실자 측위를 도출하는 것이며 본 시스템에서는 스마트폰을 태그로 활용하였다. 비콘을 일정 거리 이내에 설치하고 스마트폰에서 어플리케이션을 이용하여 비콘 모듈로부터 비콘 ID와 RSSI값을 수신하고 인터넷 통신에 의해 원거리의 게이트웨이로 데이터를 전송한다. 게이트웨이에 수신된 태그를 기준으로 비콘의 RSSI값을 서버로 전송하고, 다수의 비콘으로부터 수신된 RSSI데이터는 측위를 위해 거리정보로 변환된다. 이때 거리정보로 변환된 RSSI값을 Wi-fi 통신을 통해 공기청정기에 전달하여 재실자의 위치를 확인할 수 있으며 이를 도식화하면 다음 Figure 2와 같다.
본 연구에서 개발한 BLE beacon을 활용한 재실자 위치 인식 시스템을 검증하기 위하여 Figure 3의 좌측과 같이 가로 0.75 m, 세로 0.75 m 크기의 바닥에서 각 모서리에 비콘을 설치하고 태그 위치 인식의 정확성을 검토하고자 하였다. 이와 같은 바닥 면적크기는 본 시스템의 재실자 위치인식을 위한 가장 정확도가 높은 최소 단위 면적으로 볼 수 있다. 본 연구에서 제작한 어플리케이션을 활용하여 데이터값과 전파손실도에 따른 보정값을 비교하여 그 오차를 검토하였다. 애플리케이션에 나타난 화면은 다음 Figure 3의 우측에 나타난 창과 같으며 이를 보정하기 위한 계산식은 다음 식 (2)와 같이 나타내었다.
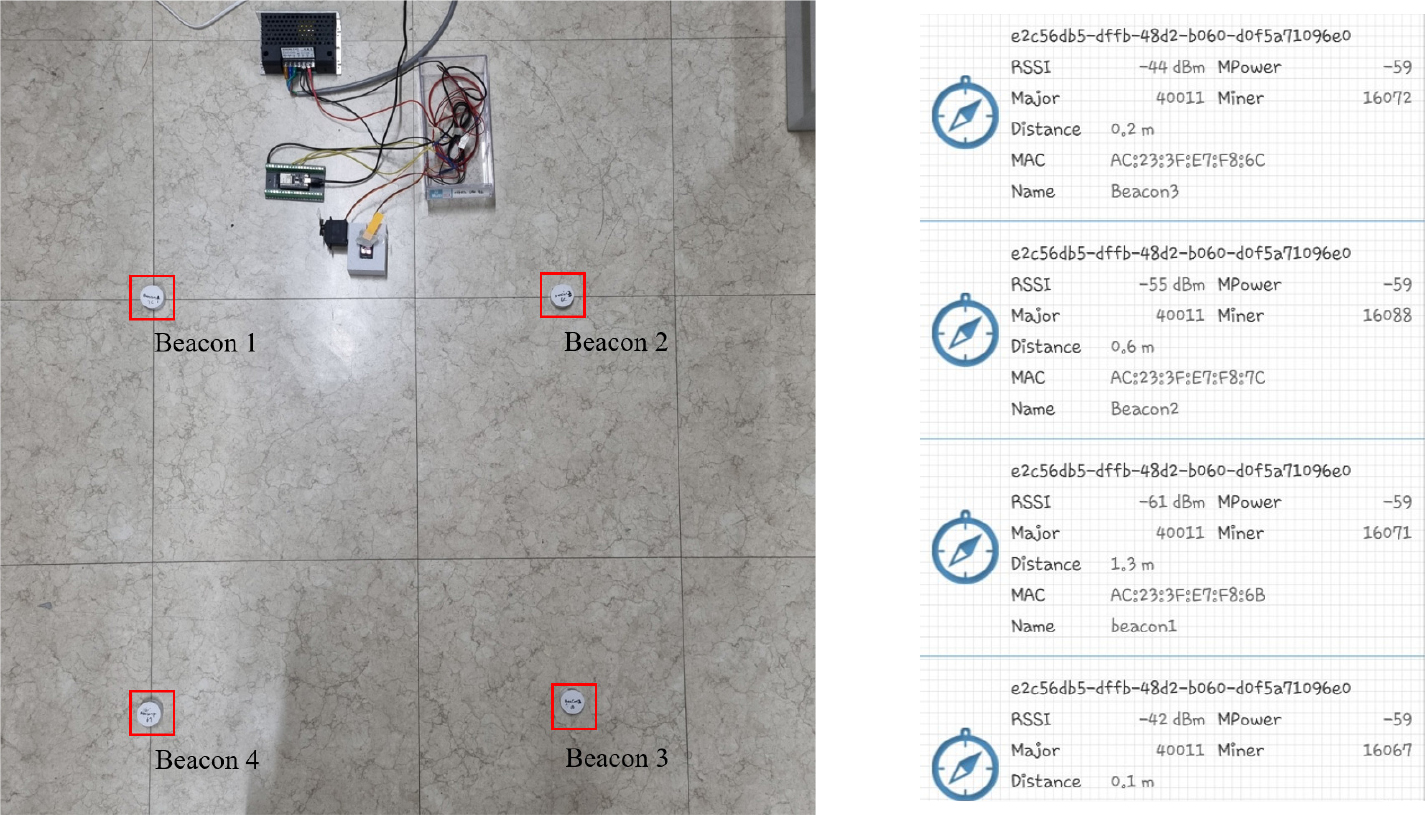
여기서 d는 거리, Tx power는 송출신호크기, n은 전파손실도를 의미하며, 장애물이 없는 경우에는 n을 2로 볼 수 있다. 해당 최소 바닥면적내에 태그를 위치시키고 10회 이상 위치 측정을 실시하였고 어플리케이션을 통하여 나타난 RSSI 값을 활용하여 가장 가까운 비콘과 태그의 거리를 계산하였다. 또한 계산된 거리의 평균과 실제 거리와의 오차를 계산하여 비교한 결과를 다음 Table 1과 같이 나타내었다. 거리 오차 및 표준 오차를 분석한 결과, 본 시스템이 호흡역을 특정하는 데는 큰 문제가 없을 것으로 판단되었다. 또한 해당 위치에 따라 서보모터의 각도 조절이 가능한 것으로 나타났다.
Table 1.
Distance measured by the system
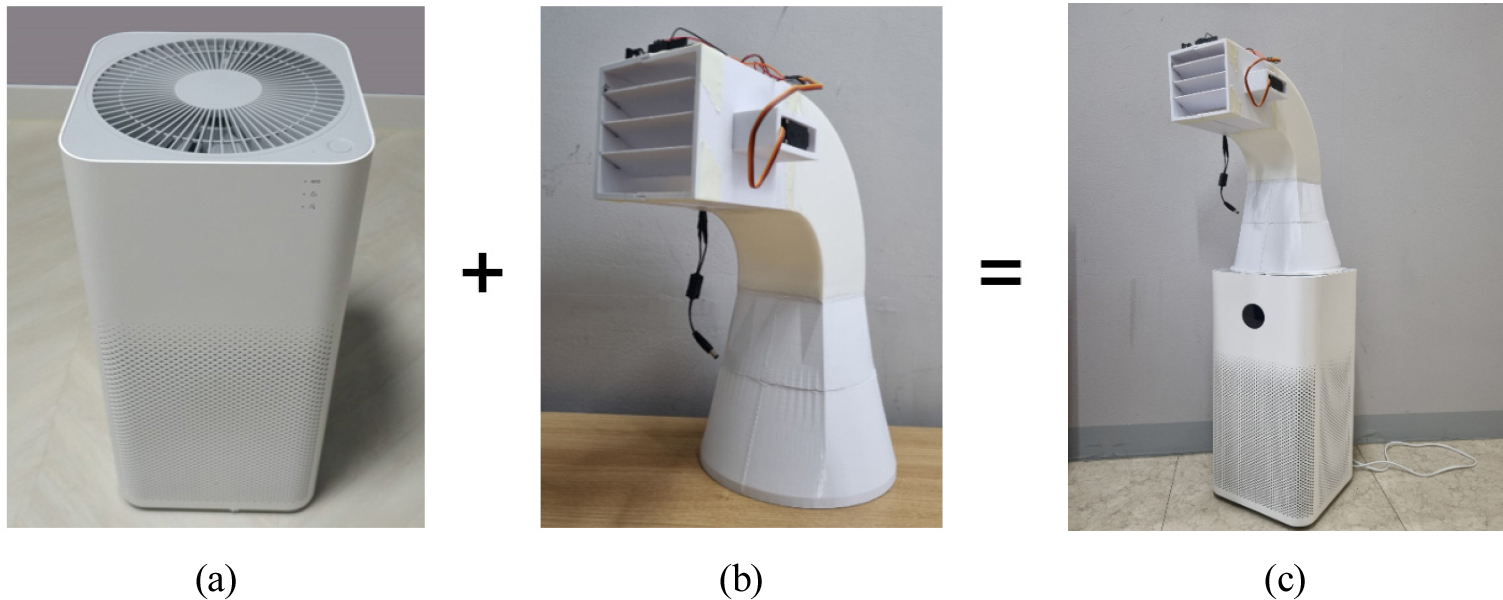
이와 같이 재실자의 위치를 인식하여 해당 정보를 공기청정기 블레이드에 전달하여 재실자가 위치한 방향 및 높이로 각도를 조절하고자 하였다. 다음 Figure 4와 같이 3D 프린터를 활용하여 공기청정기에 탈부착이 가능한 블레이드를 제작하고 서보모터를 연결하여 블레이드의 방향 및 각도를 조절할 수 있게 설계하였다.
재실자 호흡역 중심 공기질 제어의 효과
챔버 실험 개요
미세먼지와 같이 인체에 유해한 물질이나 미세한 입자를 활용한 실험을 수행할 경우 취급시 각별한 주의가 필요하다. 또한 실험 수행 시에 온도, 습도, 침기 및 누기 등 제어하지 못하는 변수로 인하여 부정확한 결과가 도출될 수 있기 때문에 항온항습과 충분한 기밀성능을 갖춘 챔버에서 실험을 수행할 필요가 있다. 이에 본 연구에서는 공기청정기를 활용한 미세먼지 농도 저감실험을 수행하기 위하여 8 m3 크기의 대형챔버에서 실험을 수행하였다. 특히 미세입자를 활용한 실험을 수행하기 위하여 기밀도 평가를 선행하여 충분한 성능을 갖춘 챔버인지를 검토하였다. 미세먼지의 농도를 측정하기 위하여 입자 수농도를 측정할 수 있는 TSI사의 파티클 카운터를 사용하였으며 측정기의 성능 및 제원은 다음 Table 2와 같다. 또한 공기청정기의 기류에 의해 본 파티클 카운터의 측정 오류가 나타나지 않았음을 충분히 검토하였다.
Table 2.
Specification of particle counter
챔버 기밀성능평가
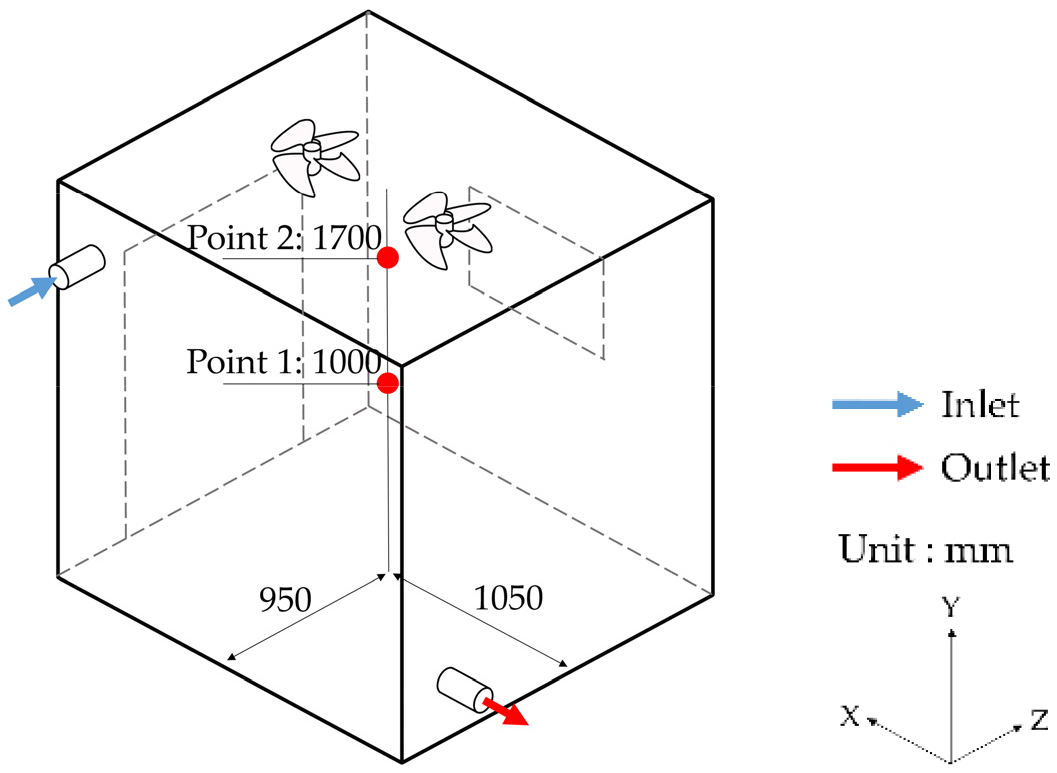
8 m3 챔버의 기밀 성능을 평가하기 위하여 공기청정기 시험 표준인 SPS-KACA002의 기밀도 평가방법을 통하여 기밀성능을 평가하였다. 미세입자를 활용한 챔버의 기밀성능평가는 챔버 내부에 일정 농도 수준 이상의 미세먼지를 발생시키고 일정 시간이 지난 후 감소되는 양을 통하여 그 기밀성능을 평가할 수 있다. 이에 따라 PSL (polystyrene Latex) 2 ㎛ 표준입자 용액을 증류수와 혼합하여 일정한 압력을 유지하며 미세입자를 발생시켰다. 미세입자의 농도를 측정할 수 있는 파티클 카운터를 챔버 중심에서 바닥으로부터 1000 mm 높이에 Point 1, 1700 mm 높이에 Point 2를 설치하였으며 챔버 내부의 모습은 Figure 5와 같다. 챔버 내의 배경입자농도는 입자크기가 0.3 μm 인 입자에 대하여 Point 1과 Point 2의 위치에서 모두 4.52×104 개로 나타나 공기청정기 시험 표준에서 제시하는 3×105 개/m3 이하를 만족하였다. 또한 시험챔버의 기밀도는 입자크기가 0.3 μm 인 입자에 대해 20분 경과 후의 입자농도가 초기농도의 90% 이상을 확보하는지 여부로 판단하였다.
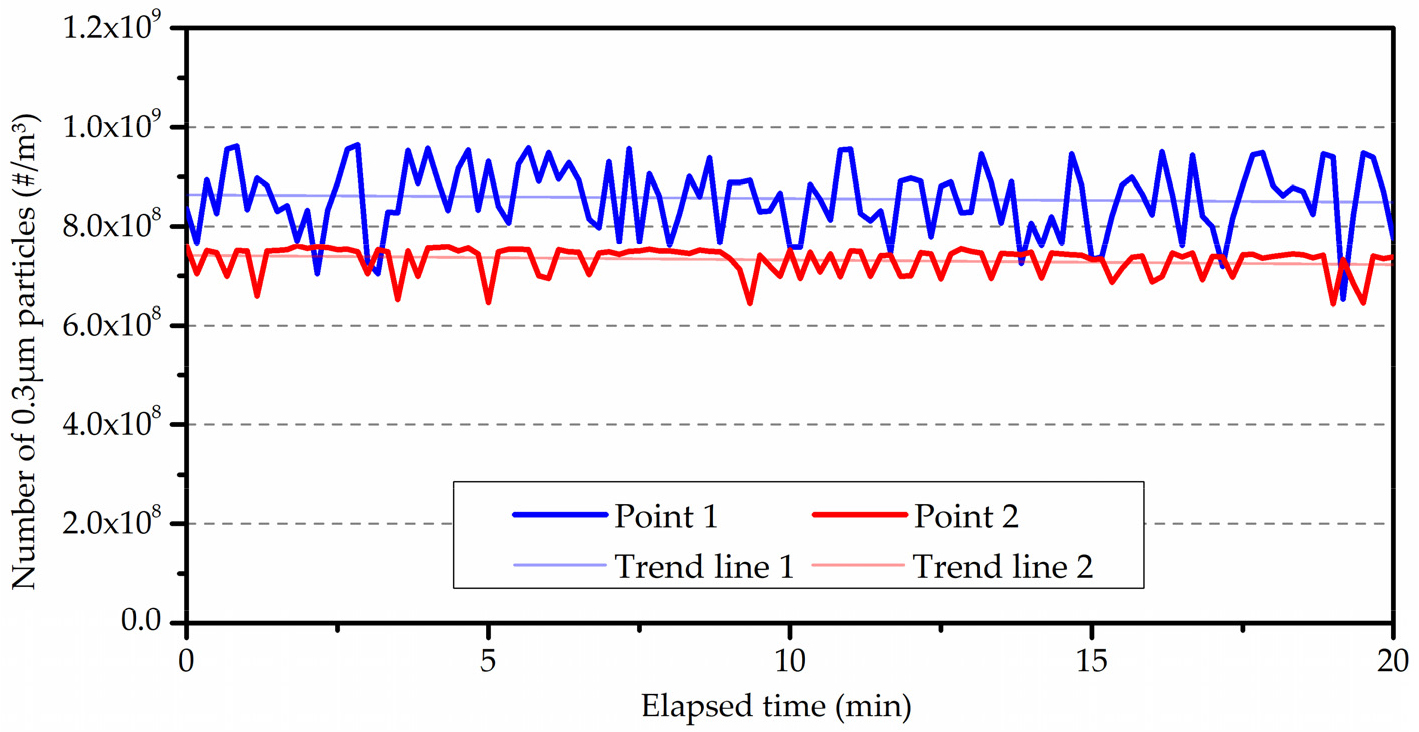
실험이 수행되는 동안 챔버 내부의 온도는 23℃, 상대습도는 50% 유지하도록 제어하였다. 이후 챔버의 급기밸브와 배기밸브를 닫아 기밀상태로 유지시키고 20분 뒤의 내부에 설치된 2대의 파티클 카운터에서 입자의 농도 변화를 측정하였다. 기밀된 상태로 20분 간의 농도 변화를 추세선으로 나타내어 Figure 6과 같이 나타내었으며 입자크기 0.3 ㎛ 의 입자 농도 변화를 통하여 챔버의 기밀성능을 검토하였다. 그 결과 0.3 ㎛ 입자의 농도가 초기 농도에 비하여 Point 1과 Point 2에서 각각 1.7%, 2.5%씩 감소되었다. 다시 말해 두 측정 지점에서 모두 미세입자를 활용한 기밀 성능이 97% 이상으로 확보되어 표준요구치인 시험챔버의 기밀도를 평가하기 위한 조건인 90% 이상의 기밀성능을 만족하는 것으로 확인되었다. 이에 따라 기밀성능평가 결과 본 연구에서 활용한 8 m3 챔버가 적절한 기밀성능을 갖추었으며 미세입자를 활용한 실험을 수행할 수 있는 충분한 기밀 수준을 보인 것으로 나타났다.
Case 설정
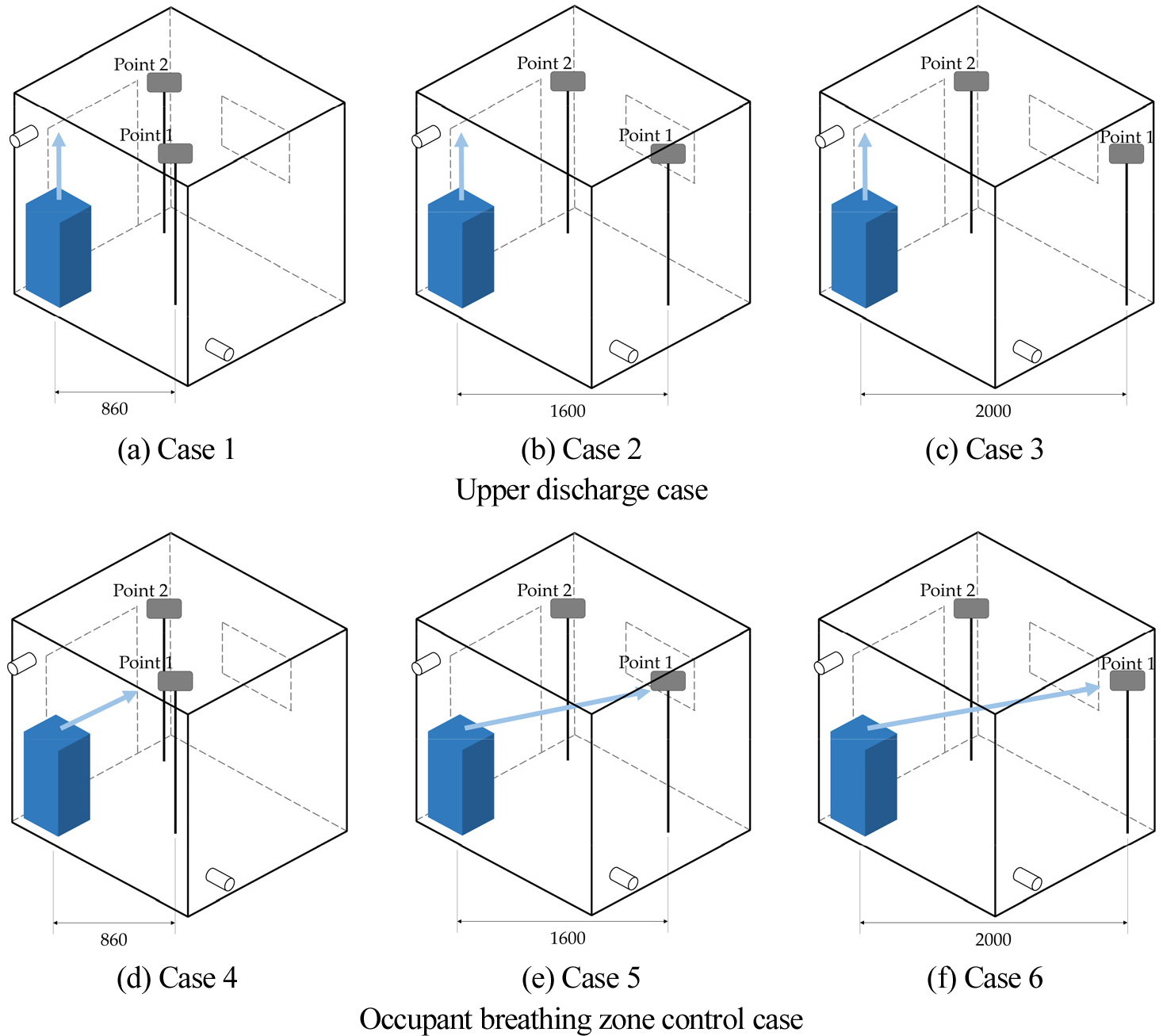
본 실험에서는 기존의 공기청정기 운용 방식인 상부토출 방식과 블레이드를 활용한 재실자 호흡역 중심으로 정화된 공기를 도입하는 방식을 비교하기 위하여 Case를 분류하였다. 측정 위치는 재실자 호흡역 위치와 비교를 위한 공간 지점을 설정하였다. 공기청정기의 블레이드를 통한 정화된 공기 토출 시 약한 풍량, 중간 풍량 그리고 강한 풍량과 같이 3가지 풍량을 기준으로 재실자의 쾌적감을 저해하지 않는 풍속으로 정화된 공기를 도입하고자 하였다. 실내의 기류에서 재실자가 쾌적하게 느끼는 범위의 풍속을 0.2 ~ 0.5 m/s로 정의할 수 있다. 이와 유사한 연구(Park et al., 2020)에서는 0.8 m/s를 최대풍속으로 설정하였으나 본 연구에서는 실내 기류 불감기류를 참고하여 풍속을 정의하였다. 이에 따라 재실자가 쾌적감을 느끼는 최대 풍속인 0.5 m/s를 만족하는 공기청정기의 풍량과 거리를 도출하였다. 각 풍량에서 풍속 0.5 m/s를 만족하는 거리를 도출한 결과 8 m3 챔버 내부에서 최대 거리인 2 m, 1.6 m 그리고 0.86 m인 것으로 나타났다. 측정 위치는 위 최대 거리에 따라 재실자 호흡역 위치인 Point 1에 파티클 카운터 1개를 설치하고 이와 비교하기 위하여 챔버 출입문 좌측에 위치한 국부영역인 Point 2에 파티클 카운터를 설치하였다. Point 2는 모든 Case에서 동일한 위치에 설치하고 각 Case 마다 Point 1과 같은 높이에서 측정하여 미세먼지 농도 저감 성능을 비교하였다. 각 Case는 Figure 7과 같이 크게 Case 1-3은 상부토출 Case이며 Case 4-6은 재실자 호흡역 중심 Case로 분류하였다. 또한 Case 1과 4 는 약한 풍량, Case 2와 5는 중간 풍량 그리고 Case 3과 6은 강한 풍량으로 다시 분류하였다. 풍량에 따라 Point 1과 공기청정기의 거리가 달라졌으며 이를 통하여 상부 토출 Case와 재실자 호흡역 제어 Case를 비교할 수 있게 설정하였다. 이후 표준입자 용액을 증류수와 혼합 후 에어로졸 발생장치를 활용하여 챔버 내부로 주입하였다. 모든 Case에서 챔버 내부의 초기 0.3 μm 입자수를 약 6.5×10⁸로 동일하게 설정하였다. 또한 공기청정기 가동 후 내부 0.3 μm 입자의 수가 초기 입자 수의 1/10 의 지점까지 도달하는 시간을 측정하고 이를 기반으로 각 Case의 농도 저감 효율을 비교하였다.
결과 및 토의
인체 호흡역 중심 공기질 제어의 미세먼지 농도 저감 효과
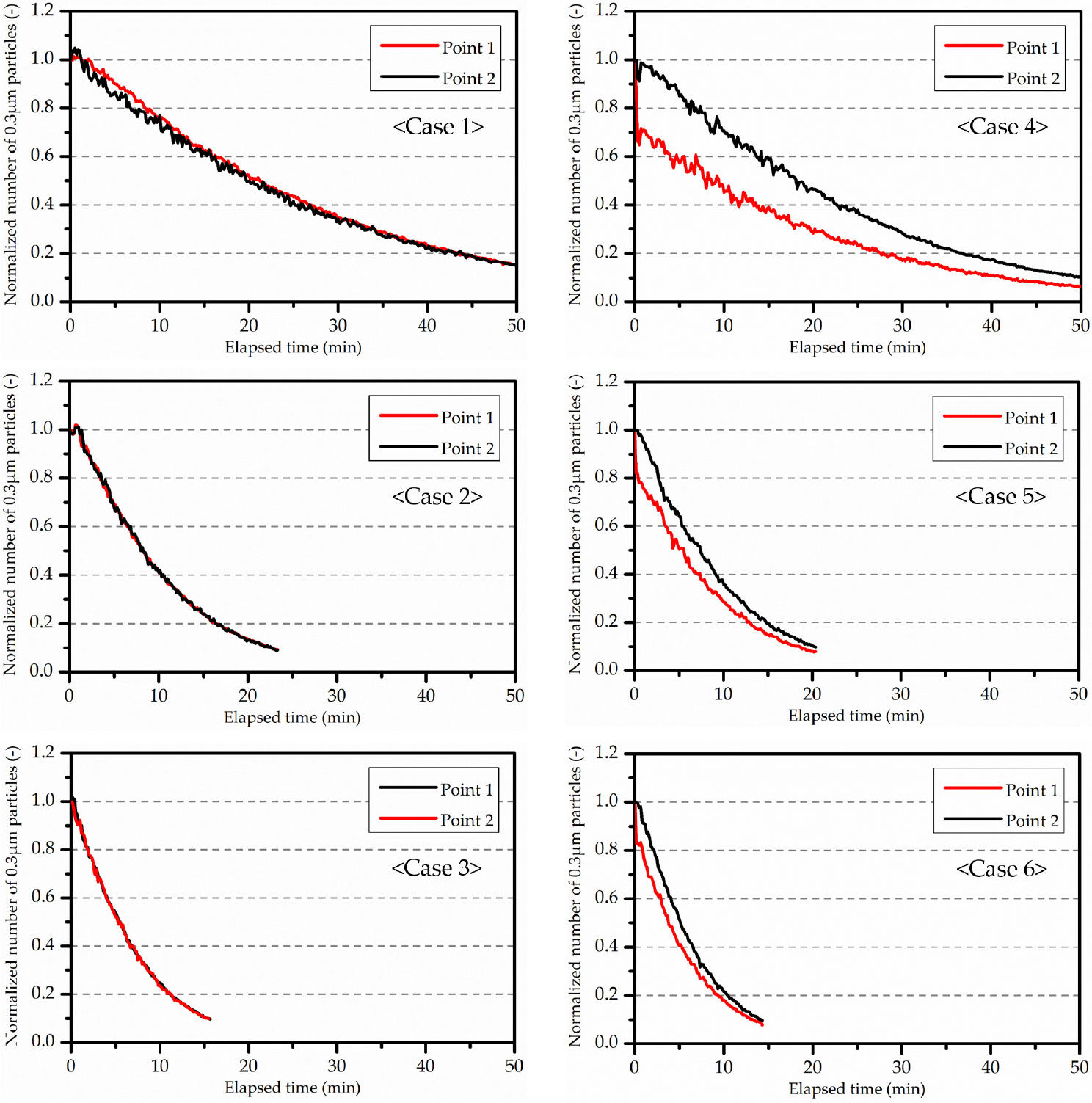
각 Case 별로 미세먼지 저감 성능을 도출한 결과 상부토출 Case의 경우 0.3 μm 입자의 수가 초기 입자 수의 1/10 의 지점까지 도달하는 시간은 Point 1과 Point 2에서 모두 동일하게 Case 1이 3630초, Case 2가 1360초 그리고 Case 3이 930초인 것으로 나타났다. Point 1과 Point 2 두 측정 지점에서의 농도는 동일하게 감소하였으며 이를 통하여 공기청정기의 기존 운용 방식의 경우 같은 공간의 거리 내에서는 유사한 미세먼지 농도 저감 성능을 보인 것으로 나타났다. 이와 함께 각 풍량에 비례하여 미세먼지의 농도 저감률이 얼마나 되는지 정량적으로 검토할 수 있었다. 재실자 호흡역 제어 Case의 경우 Point 1 에서 0.3 μm 입자의 수가 초기 입자 수의 1/10 의 지점까지 도달하는 시간은 Case 4에서 2490초, Case 5에서 1120초 그리고 Case 6에서는 800초인 것으로 나타났다. 반면 Point 2에서는 상부토출 Case의 Point 2와 동일한 미세먼지 농도 감소 시간을 보였다. 이에 따라 상부토출 Case와 재실자 호흡역 제어 Case의 농도감쇠 무차원한 결과를 Figure 8과 같이 나타내어 비교하였다. 이와 같이 재실자 호흡역 방향으로 공기청정기의 정회된공기를 도입할 경우 유의미한 미세먼지 농도 저감 성능을 보였으며 그 결과를 다음 Table 3과 같이 나타내었다. 그 결과 기존 공기청정기의 운용방식보다 재실자 호흡역 제어 방식이 최소 7%에서 최대 17%까지 미세먼지 농도 저감 효율이 높은 것으로 나타났다.
결 론
본 연구에서는 BLE beacon을 활용한 재실자 위치 인식 시스템을 개발하고 사용자 위치기반 스마트 공기청정 시스템을 개발하고자 프로토타입을 제작하였다. 특히 재실자 호흡역 중심의 공기질 제어 방식이 가지는 효과를 검토하기 위하여 미세먼지 농도 저감 성능실험을 수행하였다. 미세먼지 농도 저감 실험은 8 m3의 실험 챔버를 활용하여 제어된 조건 내에서 재실자의 호흡역을 기준으로 공기청정기의 일반적인 운용 방식인 상부토출형과 재실자 인식 스마트 공기청정 시스템의 성능을 비교하였다. 이와 같이 사용자 위치기반 스마트 공기청정 시스템의 실험 결과를 요약하면 다음과 같다.
(1)BLE beacon을 활용한 재실자 위치 인식 시스템의 검증 결과 cm 단위의 위치 정확도를 보이지는 못하였으나 재실자의 위치를 특정할 수 있다고 판단되며 이를 통하여 재실자 위치에 따라 각도 조절이 가능한 공기청정기 블레이드 Mock-up을 제작하였다.
(2)재실자 호흡역 중심 공기질 제어의 효과를 규명하기 위하여 8 m3 대형챔버를 활용하여 실험을 수행하고자 하였다. 챔버 기밀성능평가를 선행한 결과 미세입자를 활용한 실험을 수행할 수 있는 충분한 기밀 수준을 보인 것으로 나타났다.
(3)8 m3 대형챔버에서 공기청정기의 일반적인 운용 방식과 재실자 호흡역 중심 공기질 제어 방식을 비교한 결과 최소 7%에서 최대 17%에 이르는 미세먼지 농도 저감 효과가 있는 것으로 나타났다.
이와 같이 BLE beacon을 통하여 재실자의 위치를 파악하는 데에 그치지 않고 공기청정기 블레이드를 활용하여 실내공기질을 제어하려는 연구를 수행하였다. 또한 재실자 위치 정보와 데이터들을 활용할 수 있도록 애플리케이션을 제작하였다. 본 연구에서는 제한된 비콘의 개수와 면적에서 실험을 수행하여 위치 인식 정확도와 범위에서 한계가 있었으나 비콘의 개수를 늘려 단위 면적을 확장시킨다면 더 넓은 면적에서의 재실자 인식이 가능하다. 이러한 경우 오피스와 같이 재실자의 거동이 적은 실내 환경에서 위치정보만을 활용하여 앉은 위치의 호흡역에 정화된 공기를 도입할 수 있다. 또한 다른 용도의 실내환경에서 호흡역 추적의 정확도를 향상시키기 위해서는 별도의 센서가 추가되어 플랫폼을 구성해야할 것으로 보인다. 이에 따라 향후 연구에서는 실제 조건에서 재실자 위치 인식 시스템을 설치하고 재실자 위치로 공기청정기의 정화된 공기 도입 시 그 효과에 대하여 검토해 보아야 한다. 뿐만 아니라 재실자의 위치 정보와 패턴을 활용하여 재실자의 행위를 예측하고 이를 기반으로 실내공기질을 제어하는 스마트 공기청정 시스템 개발에 대한 연구를 수행하고자 한다.
